

By 1953 the Cyclemaster craze had firmly taken hold, both at home and abroad. Adventurous chaps who fancied motoring internationally had been frustrated after the war because of a shortage of vehicles. But the Cyclemaster provided the ideal combination of factors to enable one-man expeditions, ie it was cheap; it was easy to maintain; and it used a bicycle as its base, which could be repaired anywhere in the world.
The Cyclemaster only ruled the road for a short period, between 1951 and 1955, before the introduction of the NSU Quickly made it obsolete. But, in that time, it captured the public imagination and the minds of many pondered different creative ways to utilise this wondrous ‘Magic Wheel.’ Apart from a Cyclemaster lawnmower, the Cyclemaster mostly remained as a two-wheeled contraption. But, in India, they hit upon the brainwave of fitting the engine to the front wheel of rickshaws (below). Then, in 1954, R.A Harding (Bath) Ltd, a maker of invalid carriages spotted an opportunity to capitalize on their ‘Two-Wheel Steering’ tricycle by motorising it.
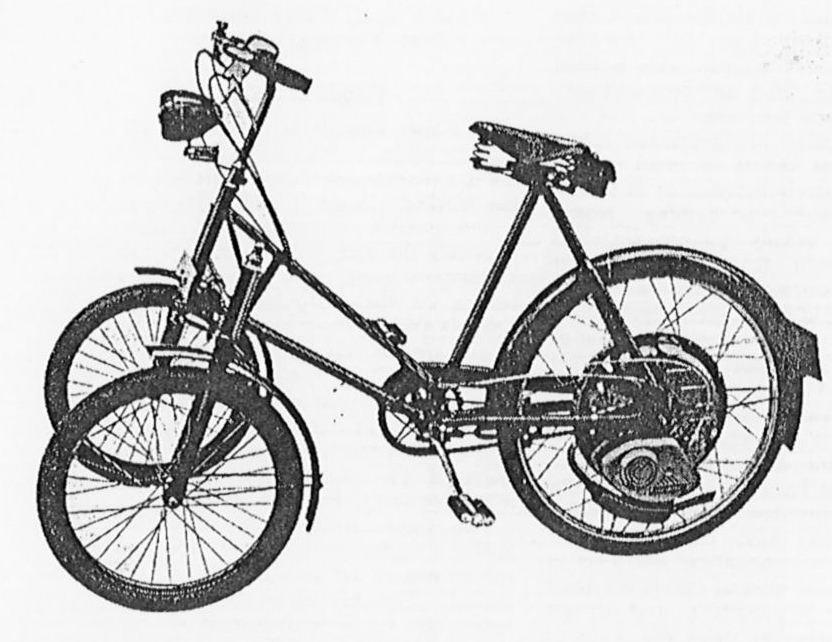
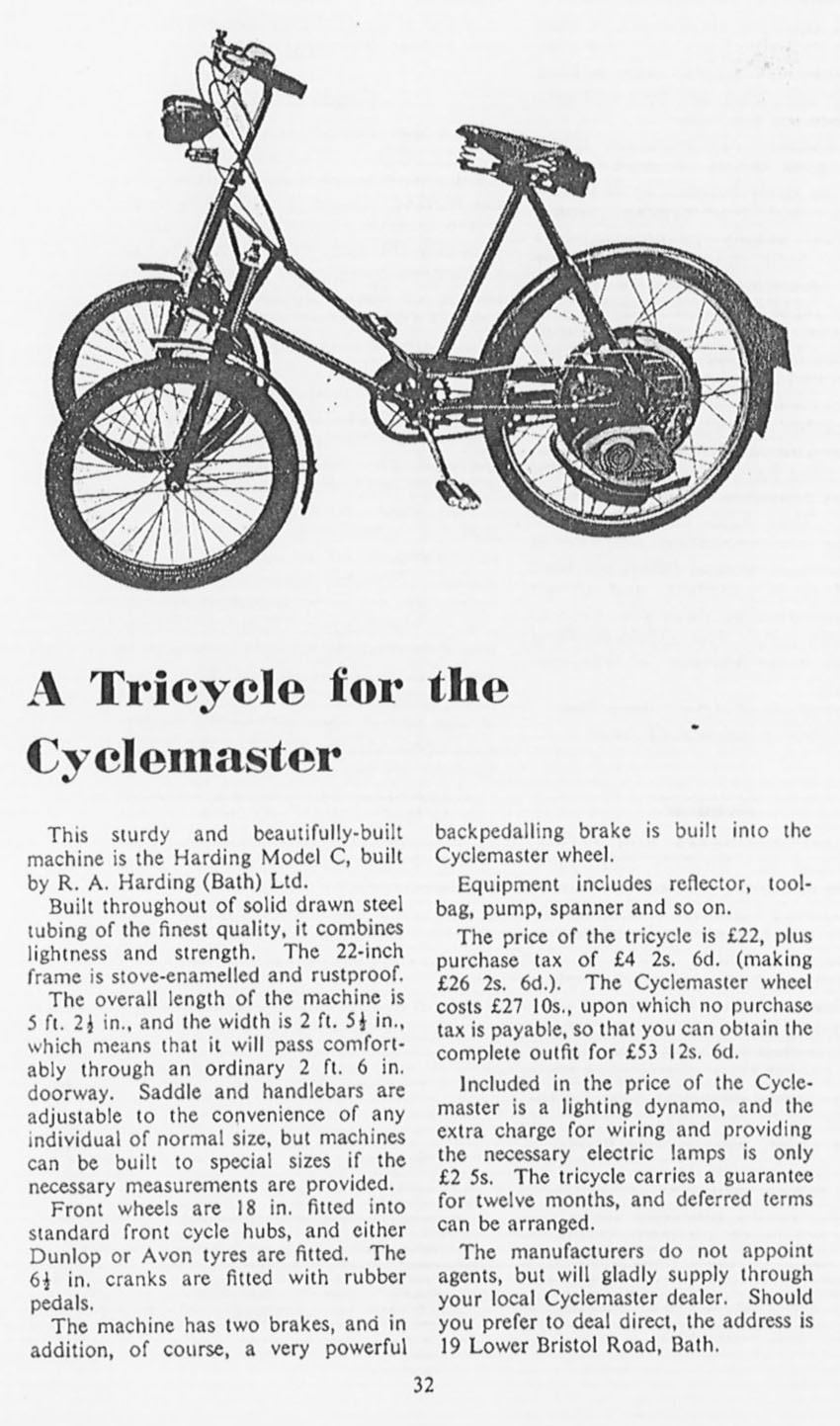
The Harding ‘Model C’ Motorised Tricycle of 1954 was one of the more imaginative uses for the Cyclemaster engine. As you can read in my report below, it did have a design fault in its original specification, but it is a very attractive machine and, once the necessary modifications have been made, it rides as well as you can expect for an early 1950s 32cc motorised tricycle.


1954 Harding ‘Model C’
TWS (Two-Wheel Steering) Tricycle
with 32cc Cyclemaster Engine
18″ Front Wheels
26″ Rear Wheel
Engine no 138427
(Now sold)

In the form that it was supplied in 1954, the Harding tricycle is dangerous to ride: the small (18″) front wheels and Ackerman steering make it unstable. It’s prone to get to stuck at full lock, and any pot-hole or bump in the road can easily turn the steering into full lock. So we have improved on the original design and built a cage onto the centre of the steering to prevent this happening. You can see it in close up further down the page.
My mechanic spent many weeks restoring this machine, to ensure that it is safe to ride. It now rides very well. You can see me testing it on a road with adverse camber, in the video below.
Cosmetically, it is still in its original paint, with its original transfer (decal) on the headstock, which is rare to find. It originally had two brakes fitted to the rear wheel, but we removed one; it now has one mechanical brake and also a coaster brake in the Cyclemaster engine. It is not road-registered.



TO SEE THE VIDEO OF THE HARDING 32cc TRICYCLE
on youtube
http://youtu.be/O-_cBkKADQM
PLEASE CLICK HERE

R.A HARDING (BATH) LTD
19, Lower Bristol Rd, Bath, Avon

R.A. Harding was based in Bath, well-established pre-war as a manufacturer of ‘bath chairs.’ The company was established in 1921 by Mr. J. Gordon and Mr. E. Loxley. For the company, they used the maiden name of Mr. Loxley’s wife. In the early years, they made a greater variety of invalid carriages than any other manufacturer. By 1930 they offered eight different models. They built invalid carriages for the government during WW2, but found it hard to compete with AC when that company moved into the market. Their motorized tricycles ceased production by the early 1950′s, though their tricycle range continued.
Like Kendrick of Reading, they also dabbled with TWS (Two-Wheeled Steering) tricycles, though the Harding models had 18″ front wheels. In the Magic Wheel magazine of July 1954, they announced their new Harding ‘Model C’ TWS tricycle with a Cyclemaster engine fitted.










ACKERMAN STEERING
Ackermann steering geometry is a geometric arrangement of linkages in the steering of a vehicle designed to solve the problem of wheels on the inside and outside of a turn needing to trace out circles of different radius. It was invented by the German carriage builder Georg Lankensperger in Munich in 1817, then patented by his agent in England in 1818, Rudolph Ackerman (1764–1834) for horse drawn carriages. Erasmus Darwin may have a prior claim as the inventor dating from 1758.
The intention of Ackermann geometry is to avoid the need for tyres to slip sideways when following the path around a curve. The geometrical solution to this is for all wheels to have their axles arranged as radii of a circle with a common centre point. As the rear wheels are fixed, this centre point must be on a line extended from the rear axle. Intersecting the axes of the front wheels on this line as well requires that the inside front wheel is turned, when steering, through a greater angle than the outside wheel.
Rather than the preceding ‘turntable’ steering, where both front wheels turned around a common pivot, each wheel gained its own pivot, close to its own hub. While more complex, this arrangement enhances controllability by avoiding large inputs from road surface variations being applied to the end of a long lever arm, as well as greatly reducing the fore-and-aft travel of the steered wheels. A linkage between these hubs moved the two wheels together, and by careful arrangement of the linkage dimensions the Ackermann geometry could be approximated. This was achieved by making the linkage not a simple parallelogram, but by making the length of the track rod (the moving link between the hubs) shorter than that of the axle, so that the steering arms of the hubs appeared to ‘toe out.’ As the steering moved, the wheels turned according to Ackermann, with the inner wheel turning further. If the track rod is placed ahead of the axle, it should instead be longer in comparison, thus preserving this same ‘toe out.’





CYCLEMASTER ENGINE













Ackerman Steering – http://en.wikipedia.org/wiki/Ackermann_steering_geometry

{kind=link}